If you divide 4 by 2 you would get 2 as the quotient, which means there are exactly two 2’s in 4. And similarly, If you divide 5 by 2, you would get 2 as the quotient and 1as the remainder, which means there are two 2’s in 5 and a 1 which if you …
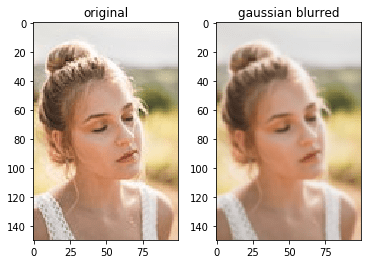
Convolution is a process used for applying general-purpose filter effects like blurring, sharpening, embossing, edge detection, and more. To understand convolutions we must first understand what a convolution matrix is, also referred to as kernel. Take for example the blurring filter. In blur filter, we set each pixel to the mean of its neighbouring pixels. …

In this article, I will explain a widely used method for segmenting handwritten documents into individual lines. Below is a sample output from my algorithm. The below flowchart outlines the different steps involved in the segmentation process. The explained method will only work with non-skewed documents. To de-skew the document, you can refer to my …
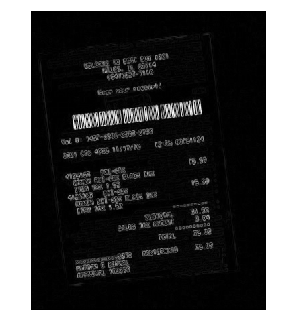
An important pre-processing step in any OCR tool or algorithm is to deskew the scanned document first. Take a look at the below sample scanned image, its tilted by a small angle. In this article I will explain a method to deskew these types of documents using their horizontal projections. The final outcome of deskewing …
The greatest headache for any machine learning engineer is the problem of overfitting. The model we trained works perfectly on the training dataset but when applied to other new dataset it fails miserably. This is because of overfitting where our classifier learns the provided dataset accurately but fails when applied on new data. One good …
The basic idea is to find the Xmin, Xmax, Ymin, Ymax of each identified coordinates of the contour and then create a rectangle using it. Lets understand this with an example: Import the necessary libraries, read the input file, convert it to grayscale and plot it. from skimage.measure import find_contours from skimage.io import imread …
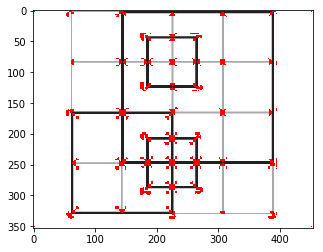
The Harris corner detection algorithm also called the Harris & Stephens corner detector is one of the simplest corner detectors available. The idea is to locate interest points where the surrounding neighbourhood shows edges in more than one direction. The basic idea of algorithm is to find the difference in intensity for a displacement of …
Gradient descent is an optimization method used to find the minimum value of a function by iteratively updating the parameters of the function. Parameters refer to coefficients in Linear Regression and weights in Neural Networks. In a linear regression problem, we find a modal that gives an approximate representation of our dataset. In the below …

Sobel operator is used in computer vision particularly in edge detection algorithms. The operator uses two 3×3 kernels which are convolved with the original image to calculate the image derivatives – one for horizontal changes, and one for vertical. If we define A as the original image, and Gx and Gy are two images which …