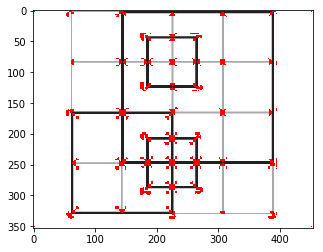
The Harris corner detection algorithm also called the Harris & Stephens corner detector is one of the simplest corner detectors available. The idea is to locate interest points where the surrounding neighbourhood shows edges in more than one direction. The basic idea of algorithm is to find the difference in intensity for a displacement of …
Month: September 2018
Gradient descent is an optimization method used to find the minimum value of a function by iteratively updating the parameters of the function. Parameters refer to coefficients in Linear Regression and weights in Neural Networks. In a linear regression problem, we find a modal that gives an approximate representation of our dataset. In the below …

Sobel operator is used in computer vision particularly in edge detection algorithms. The operator uses two 3×3 kernels which are convolved with the original image to calculate the image derivatives – one for horizontal changes, and one for vertical. If we define A as the original image, and Gx and Gy are two images which …
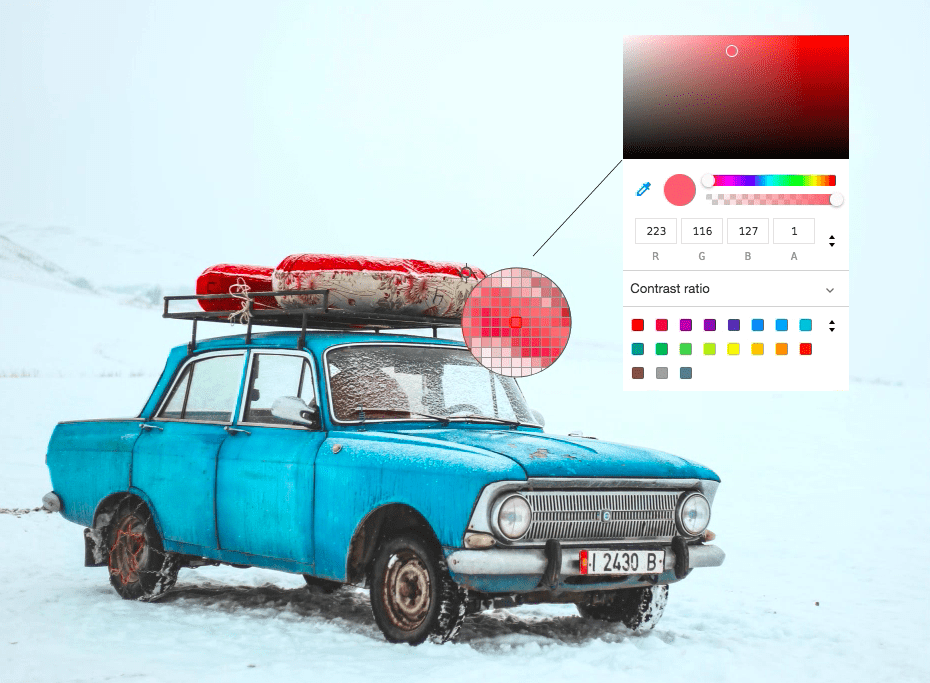
An extremely magnified image at the end is just blocks of colors called pixels, where each pixel is formed by the combination of Red, Blue and Green, our primary colors. RGB color space or RGB color system, constructs all the colors from the combination of the intensities of Red, Green and Blue colors. The red, green and …