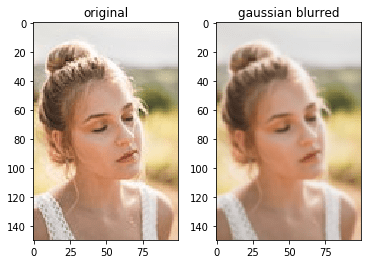
Convolution is a process used for applying general-purpose filter effects like blurring, sharpening, embossing, edge detection, and more. To understand convolutions we must first understand what a convolution matrix is, also referred to as kernel. Take for example the blurring filter. In blur filter, we set each pixel to the mean of its neighbouring pixels. […]
Basics of Image Convolution